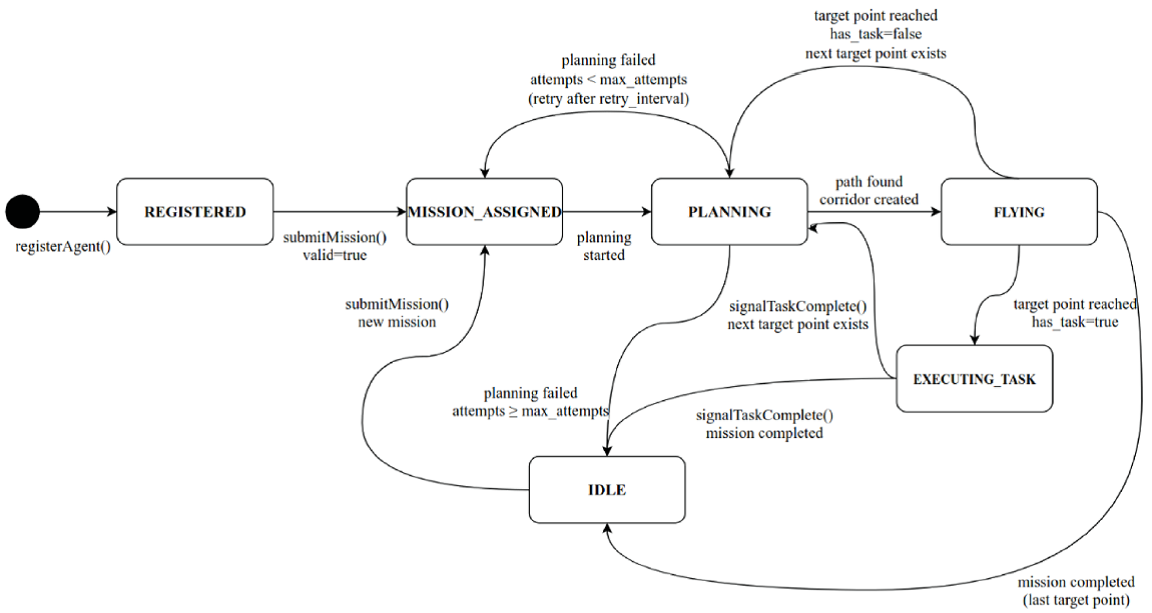
Актуальность работы обусловлена необходимостью обеспечения безопасной и эффективной эксплуатации растущего числа беспилотников в сложных городских и горных ландшафтах, где традиционные подходы к координации не справляются с плотностью трафика и динамическими препятствиями. Разработана централизованная система координации с динамическими пространственными резервациями в форме капсульных коридоров, которые синхронно сокращаются по мере движения агента, высвобождая воздушное пространство для последующих аппаратов, что отличается от статических методов блокировки маршрутов и позволяет в любой момент интегрировать новых агентов без остановки системы, обеспечивает безопасность при потере связи за счет консервативного сохранения коридоров и гарантирует бесколлизионное выполнение миссий с учетом реальной геометрии препятствий и рельефа.
Данное исследование поддерживает реализацию Указа Президента Российской Федерации от 28 февраля 2024 г. № 145 «О Стратегии научно-технологического развития Российской Федерации» в части создания интеллектуальных систем управления и навигации для роботизированных комплексов, а также развития технологий беспилотного транспорта и логистики.
Ronzhin A., Saveliev A., Anikin D., Zaytseva A., Cherskikh E., Figurek A. Collision-free multi-UAV 3D path planning using dynamic spatial reservations of reducing air corridors // Robotics and Autonomous Systems. 2026. Vol. 199. P. 105359. https://doi.org/10.1016/j.robot.2026.105359